
In order to trim the high volume of sprouts grown each year, the company was using a mechanical saw blade with smooth edges. However, due to varying degrees of wax and juice present in each sprout, the blade would not only dull quickly, but could allow for potential cross contamination between sprouts, resulting in a shorter shelf life.

Having identified the need for a more robust solution to trim the sprouts, through various testing it was concluded that vision guided robots would be a suitable replacement solution.
In order to select the most effective machine vision system, a number of options were trialled. However, after intensive testing, only Scorpion Vision could offer the flexibility and accuracy required for pick and place sprout identification when integrated on a robot.
Furthermore, the food product has its own challenges as the size and shape could vary depending on the weather e.g. warm weather in late autumn causes the sprouts to be softer and therefore more difficult for the robot to pick up. To overcome these additional challenges Scorpion Vision adapted the vision system in the way it looked at the sprout to manage changing sizes and shapes all year round.
The overall solution comprises six SCARA robots, picking and cutting 360 sprouts per minute using a 55,000 psi light jet water slice. If a product is found to be defective, the vision system ignores the item which stays on the conveyor and eventually falls off the end. Where compliant, the cut sprouts are dropped onto a separate central conveyor which runs in between all six robots, and are taken to the packaging area for distribution. Production runs 24/7 during autumn and winter, with two shifts per day during the summer low season.
Peeling sprouts with robots is no mean feat because a human being has two eyes and a brain and processes the information required to apply the knife at the right position, along the stem at just the right point that will allow the outer layer of leaves to be shed. Emulating this work with machines requires a number of innovative technologies to be integrated into one system:
- High Speed Robots
- Water Blades
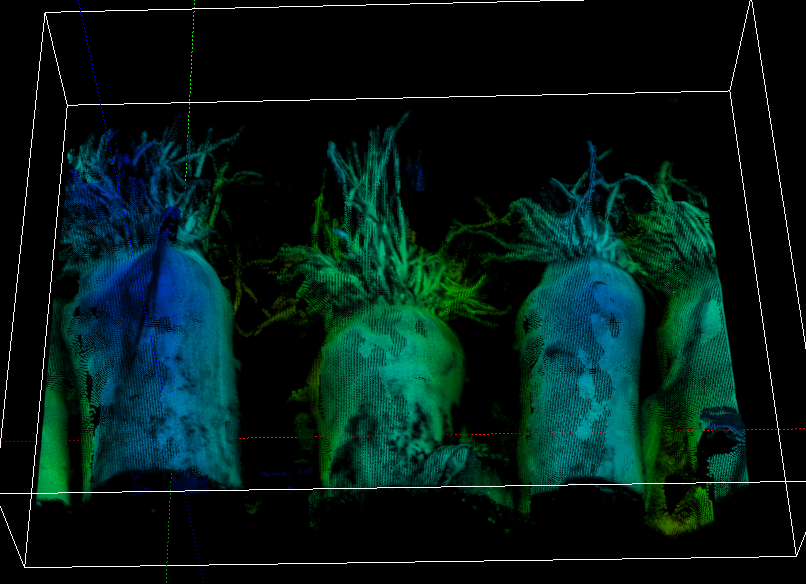
- Advanced 3D Machine Vision
It is of course the machine vision system that is the enabling technology here. Robots can pick and water blades can cut but without a clever means of locating the stem on the sprout and identifying the correct cut point, none of this will work.
Reposted from Scorpion Vision Ltd Blog Posts dated November 2018
https://www.scorpionvision.co.uk/blog/automated-sprout-peeling
https://www.scorpionvision.co.uk/blog/peeling-brussels-sprouts-with-robots